
——记北京理工大学自动化学院多智能体协同控制平台项目
近年来智能控制,无人机编队逐渐走入大众视野,经常在一些重大会议或活动上给大家带来一场视觉盛宴。多无人机编队技术在科学研究中被称为“多智能体协同控制”。该技术不仅应用于无人机编队表演,还可应用于工业作业、巡逻侦察、灾害救援、环境探索、智慧物流、智慧农业、消费娱乐等领域。
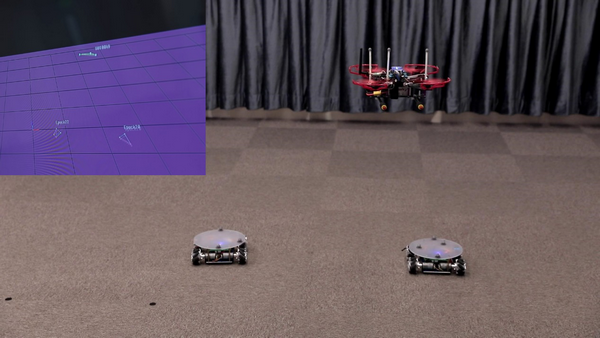
北京理工大学自动化学院夏元庆院长作为学术带头人,领导了复杂系统智能控制与决策国家重点实验室——“空地协同控制组”。多智能体空地协同控制实验平台。
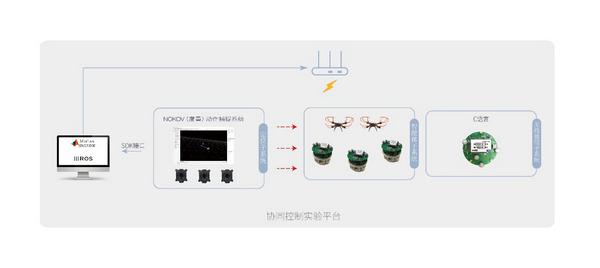
多智能体协同控制平台可为高校实验室提供同质和异质智能体的控制算法验证,为理论成果提供实验支持。该平台主要由定位系统、通信系统和控制决策系统组成。为了解决定位系统的精度和实时性问题,平台采用NOKOV(公制)光学3D动作捕捉系统。NOKOV(公制)光学3D动作捕捉系统的精度可以达到亚毫米级,延迟也在两三毫秒之内。代理的位置。明确智能体的位置后,每个智能体上的智能控制决策系统可以控制多个智能体的动作,
夏元庆教授现任北京理工大学自动化学院院长,国家首批“211工程、985工程”重点高校,教育部“长江学者”特聘教授智能控制,获得者国家杰出青年科学基金获得者,国家“万人计划”领军人才,享受国务院特殊津贴专家。夏教授从事教育工作多年,开展了多项关键技术的科学研究。他衷心希望中国青年能够立足国家重大战略需求,开发和发展具有中国核心价值观的“卡脖子”科技产品。国家'