
随着我国智能电网建设的快速发展,电网中各种用电设备的自动化程度越来越高,人少甚至无人看管的变电站也会越来越多。但直流换流站设备数量庞大,控制系统和辅助系统非常复杂。因此,无人值守模式的发展势必依赖于更加智能的监控系统。
长沙理工大学电气与信息工程学院朱天一、戴丰哲、康文、毛志平、周占凡研究员在2020年第二期《电气技术》上撰文,提出一种适用于直流换流站运行维护监控的方法。系统的智能机器人设计方法是基于数据识别技术,基于智能扫描技术对运维监控系统中的事件报警信息进行采集和分类,提取关键特征,并通过云端实现关键信息的互通。技术。一个案例研究证明了本文提出的方法的有效性。

近年来,随着我国智能电网的快速发展,电网中各种设备的自动化程度越来越高,这为减轻一线工作人员的工作强度、降低人工成本提供了必要的条件。发展“少人”变电站运行模式。根据。然而,特高压直流换流站与传统交流变电站之间存在显着差异。前者设备种类多,数量大,控制系统和辅助系统非常复杂。可见,电网公司必须依靠自身自动化、智能化水平的进一步发展,推动直流换流站“人少”的工作模式。
直流换流站在大电网的可靠互联和大规模可再生能源输送中发挥着重要作用,是电网安全稳定运行的重要保障。因此,上级调度部门和电网管理人员特别关注直流换流站设备的运行状态,尤其是站内设备缺陷、事件告警信息和故障处理等。
但是,上级管理人员对设备运行关键信息的访问权限有限,不利于及时准确掌握设备的实时运行状态。通常,直流换流站操作人员仍需通过电话向单位负责人或上级管理部门汇报各类故障信息和故障处理进度,在一定程度上影响了事故处理速度,并有对电网的可靠运行产生一定的影响。
通过对某直流换流站运行维护状况的调查发现:
1)直流换流站运行监控系统具有监控和报警功能,但“故障/异常”处理过程的信息查询、分析、决策和执行完全依赖经验和操作人员的知识,并且缺乏故障处理解决方案。辅助决策功能。2)直流换流站有多种异常告警信息。现有监控系统不具备信息筛选功能,事故处理方案的制定过程容易受到无效或低价值故障信息的影响。3)直流换流站上级调度部门和相关管理人员对“ s 宏观把握直流换流站的运行情况。因此,设计开发具有智能监控、智能分析和辅助决策功能的“监控系统智能机器人”是直流换流站安全运行的重要保障措施,对提高智能化水平具有重要意义。直流换流站,最终实现“智能机器人”。少值班经营,优化基层企业科学管理具有重要意义。s 宏观把握直流换流站的运行情况。因此,设计开发具有智能监控、智能分析和辅助决策功能的“监控系统智能机器人”是直流换流站安全运行的重要保障措施,对提高智能化水平具有重要意义。直流换流站,最终实现“智能机器人”。少值班经营,优化基层企业科学管理具有重要意义。智能分析和辅助决策是直流换流站安全运行的重要保障措施,对提高直流换流站智能化水平,最终实现“智能机器人”具有重要意义。少值班经营,优化基层企业科学管理具有重要意义。智能分析和辅助决策是直流换流站安全运行的重要保障措施,对提高直流换流站智能化水平,最终实现“智能机器人”具有重要意义。少值班经营,优化基层企业科学管理具有重要意义。
本文设计了“监控系统智能机器人”的基本结构框架,详细分析了与之相关的关键技术,然后通过具体案例验证了设计方案的可行性。

1 监控系统中智能机器人的结构框架
1.1 总体框架
监控系统智能机器人的原理如下: ①通过智能识别技术(智能采集)采集直流换流站运维监控系统的故障/事件信息,并根据数据识别对事件信息进行分类技术(智能识别),提取关键知识,实现智能报警功能;②通过云处理技术实现数据通信,通过故障信息分析系统制定故障处理方案;③利用云处理技术,将故障信息分析系统的处理建议发送至移动客户端,为运营商和管理者提供相关决策参考。
1.2 机械臂设计技术
直流换流站监控系统中智能机器人的视觉扫描功能是通过机械臂的设计实现的,其硬件结构如图2所示。机械臂本身有6个自由度,它们由臂段 I、臂段 II 和臂段 III;快速扫描摄像头安装在机械臂末端;机械臂第一段的底部安装在一个金属底座上,其内部是控制系统。硬件系统。在智能识别过程中,快速扫描摄像头可以将显示屏的主要信息以图片的形式快速记录下来,传输给基地内的控制硬件系统,进而对图像信息进行分析处理。
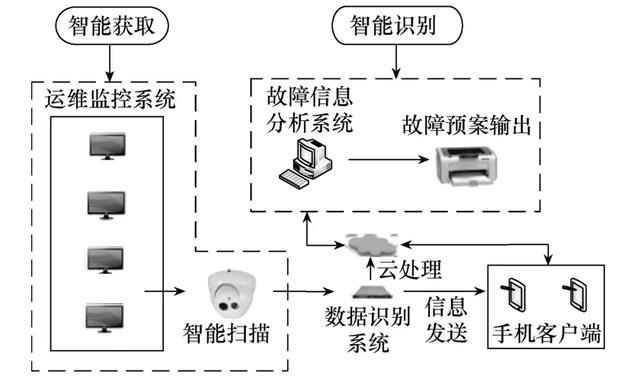
图1 监控系统中智能机器人的硬件结构
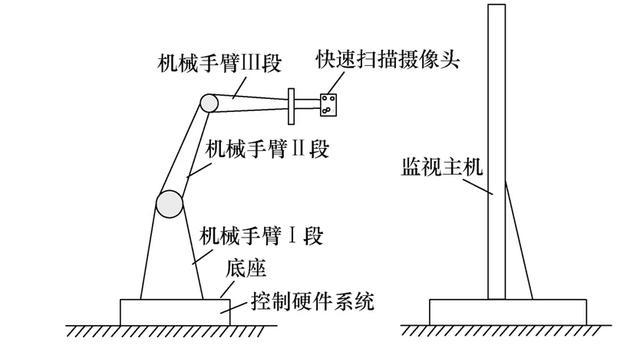
图2 机械臂硬件结构图
2 智能机器人在监控系统中的关键技术
智能识别技术主要分为两类:“快速扫描摄像头”采集关键信息和“控制硬件系统”分析信息。其中,控制硬件系统最重要的任务是分析扫描到的故障/异常信息图片。图 3 显示了系统测试过程中故障/异常信息的原始扫描。
采集到的图片信息如图所示。3包括拍摄图片的原始帧、应用软件的帧、红色警告信息和黄色警告信息。智能识别的关键是对红色预警信息的获取和分析,以及对其他无用信息的删除。
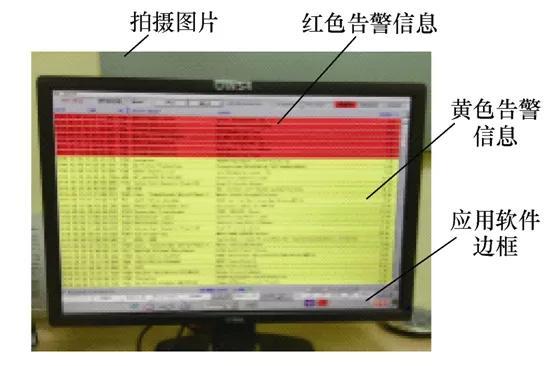
图3 扫描故障/异常信息原图
2.1 关键信息的位置
关键信息定位是智能识别的基础,即从抓拍图像中定位有用信息,分割复杂干扰信息,剔除无效信息(包括抓拍图像边框、应用软件边框、黄色预警信息)。完成关键信息的定位后,最终可以实现字符分割和识别功能。具体步骤如下。
1)利用色度的差分特征提取关键信息。如图3所示,红色预警信息与其他信息在颜色上差异较大,范围也较大,因此借助这一特性,可以快速区分“有用”和“无用”信息。
2)信息扫描的原始图像的二值化处理。控制硬件系统采用最大类间方差法选择合适的阈值。如果 t 是阈值智能监控系统,则根据 t 值划分字符和红色背景。此时“信息扫描源图像”中字符的像素比例为w1,平均灰度为u1。红色背景像素数与“信息扫描源图像”之比为w2,平均灰度为u2。因此,“信息扫描源图像”的平均灰度为
公式 (1)
字符、数字和红色背景之间的差异是

公式 (2)
当方差g达到最大值时,所需信息与红色背景的灰度差即为最大、最理想的灰度阈值。可以选择t作为“原始信息扫描图像”二值化的阈值,将“原始信息扫描图像”中灰度值小于t的像素的灰度值设置为0,将“原始信息扫描图像”的灰度值设置为灰度值大于 t 到 0. 的像素为 1。
2.2 关键信息识别
关键信息识别是将处理后的字符图片信息加工成可供信息匹配的字符信息,以方便“监控系统智能机器人”对关键信息进行编译处理。一般来说,报警信息中的字符主要是数字和英文字母。因此,首先提取待识别的数字和英文字母的特征信息,利用相应的算法对提取的特征进行分析和分类,然后再提取与待识别字符特征相似的数字和英文字母被发现。具体的关键信息识别流程如图4所示。
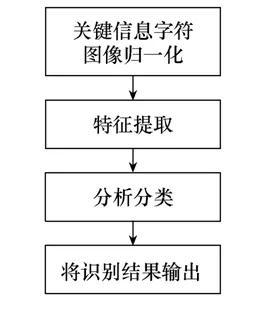
图4 关键信息识别流程图
1)数字和字母的特征提取。“监控系统智能机器人”利用左右轮廓特征的方法对数字和字母进行初步分类,然后通过密度特征对其进行细分。该方法的提取模型为
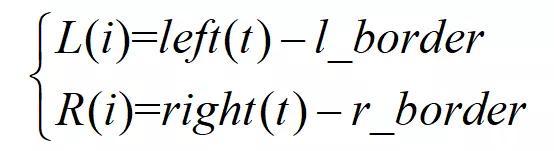
公式(3)
式中:left(t)和right(t)分别为字符图像第i行最左边和最右边边界点的位置;和 分别是人物图像左右两侧的边界。因此,可以通过对数字和字母进行扫描采样得到字符特征。
2)数字和字母的特征匹配。“监控系统智能机器人”数据库为每个角色建立了标准模板。识别出数字和字符后,只需要一一比较,根据相似度确定要识别的字符信息。该系统采用欧式距离法,其基本原理为

公式(4)
式中:x和y分别为不同的信息序列;d(x, y) 是 x 和 y 之间的距离。
2.3 特征信息匹配技术
完成关键字母和字符的识别后,应对其传递的关键信息进行“翻译”,以便直流换流站操作人员了解其真实信息。在该系统中,将提取的信息与故障数据库信息进行匹配,并通过关联模型按照大概率事件的模式显示两者之间的因果关系。
其中,事件知识模型从对象库中提取信息,将知识库中存储的各种可能事件与“监控系统智能机器人”识别的信息按照因果关系表达出来。基于因果关系的故障信息匹配技术流程如图5所示。
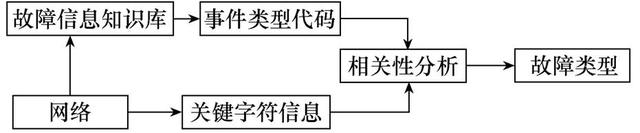
图5 故障信息匹配技术流程图
3 智能机器人在监控系统中的运行过程
监控系统智能机器人整体程序流程如图6所示。其中,图2所示的“控制硬件系统”完成故障图片的采集,并接受上位机中的信息,进而完成故障图片处理和关键字符提取。
值得注意的是: ① 采集到的故障图片在提取关键字符后可能会重复出现。因此,有必要对重复进行检测和判断。如有重复,继续采集图片,否则保存编码;② 提取关键信息和系统数据库。匹配数据库中已有知识,判断故障类别;③给出数据库中已有的决策方案,实现故障信息的智能采集和智能决策。
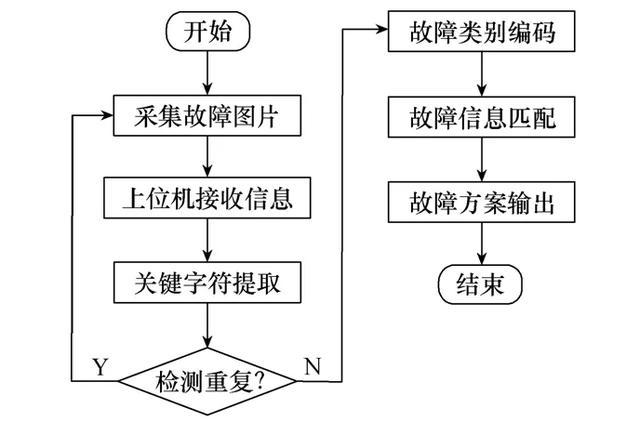
图6 整体程序流程图
4 案例研究
系统测试通过模拟特高压直流换流站的操作员系统进行。“监控系统智能机器人”采集并处理的数据信息如表1所示,根据“AC Yard;WA.Z1.提取故障日期时间、事件点组、事件记录等信息@>Q2 SF6 1" 和 "AC Yard; WA.Z1.Q2 SF6 2" 等信息检索,发现数据库中有典型的故障案例。最后,翻译发送事件消息“5612 SF6 level 1、2 alarm”。

表1 事件描述信息重构
5 结论
提出了一种用于直流换流站监控系统的智能机器人设计方法,提出了机械臂设计、智能定位、智能识别等关键技术,并介绍了系统的具体工作流程。相关研究成果适用于直流换流站“运维人员工作站”监控自动化程度的提高,尤其适用于“值班人员少、运维一体化”的换流站。
同时智能监控系统,本文提出的数据采集分析算法和图像模糊识别技术具有良好的推广价值,可应用于机器人、城市交通信号识别、智能家居等多个领域。未来,我们将继续优化软件系统,对工程应用进行深入研究。